2375 Minimum Obstacle Removal To Reach Corner
2375 Minimum Obstacle Removal To Reach Corner
Minimum Obstacle Removal to Reach Corner 
You are given a 0-indexed 2D integer array grid of size m x n. Each cell has one of two values:
1
2
0 represents an **empty** cell,
1 represents an **obstacle** that may be removed.
You can move up, down, left, or right from and to an empty cell.
Return the minimum number of obstacles to remove so you can move from the upper left corner *(0, 0) to the lower right corner *(m - 1, n - 1).
Example 1:
1
2
3
4
5
6
7
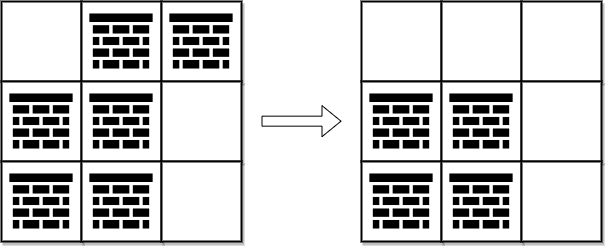
**Input:** grid = [[0,1,1],[1,1,0],[1,1,0]]
**Output:** 2
**Explanation:** We can remove the obstacles at (0, 1) and (0, 2) to create a path from (0, 0) to (2, 2).
It can be shown that we need to remove at least 2 obstacles, so we return 2.
Note that there may be other ways to remove 2 obstacles to create a path.
Example 2:
1
2
3
4
5
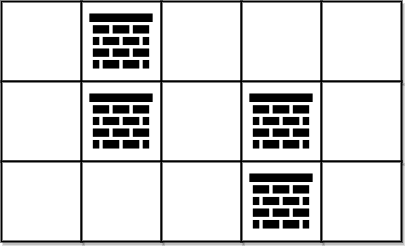
**Input:** grid = [[0,1,0,0,0],[0,1,0,1,0],[0,0,0,1,0]]
**Output:** 0
**Explanation:** We can move from (0, 0) to (2, 4) without removing any obstacles, so we return 0.
Constraints:
1
2
3
4
5
6
m == grid.length
n == grid[i].length
1 <= m, n <= 105
2 <= m * n <= 105
grid[i][j] is either 0 **or** 1.
grid[0][0] == grid[m - 1][n - 1] == 0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
from heapq import heappush, heappop
from typing import List
class Solution:
def minimumObstacles(self, grid: List[List[int]]) -> int:
rows, cols = len(grid), len(grid[0])
directions = [(1, 0), (-1, 0), (0, 1), (0, -1)]
costs = [[float('inf')] * cols for _ in range(rows)]
pq = [(0, 0, 0)] # (cost, x, y)
while pq:
cost, x, y = heappop(pq)
# If already visited with a cheaper cost, skip
if costs[x][y] <= cost:
continue
costs[x][y] = cost
# If we reach the target, return the cost
if x == rows - 1 and y == cols - 1:
return cost
# Explore neighbors
for dx, dy in directions:
nx, ny = x + dx, y + dy
if 0 <= nx < rows and 0 <= ny < cols:
heappush(pq, (cost + grid[nx][ny], nx, ny))
# If the target is unreachable (edge case)
return -1
This post is licensed under CC BY 4.0 by the author.